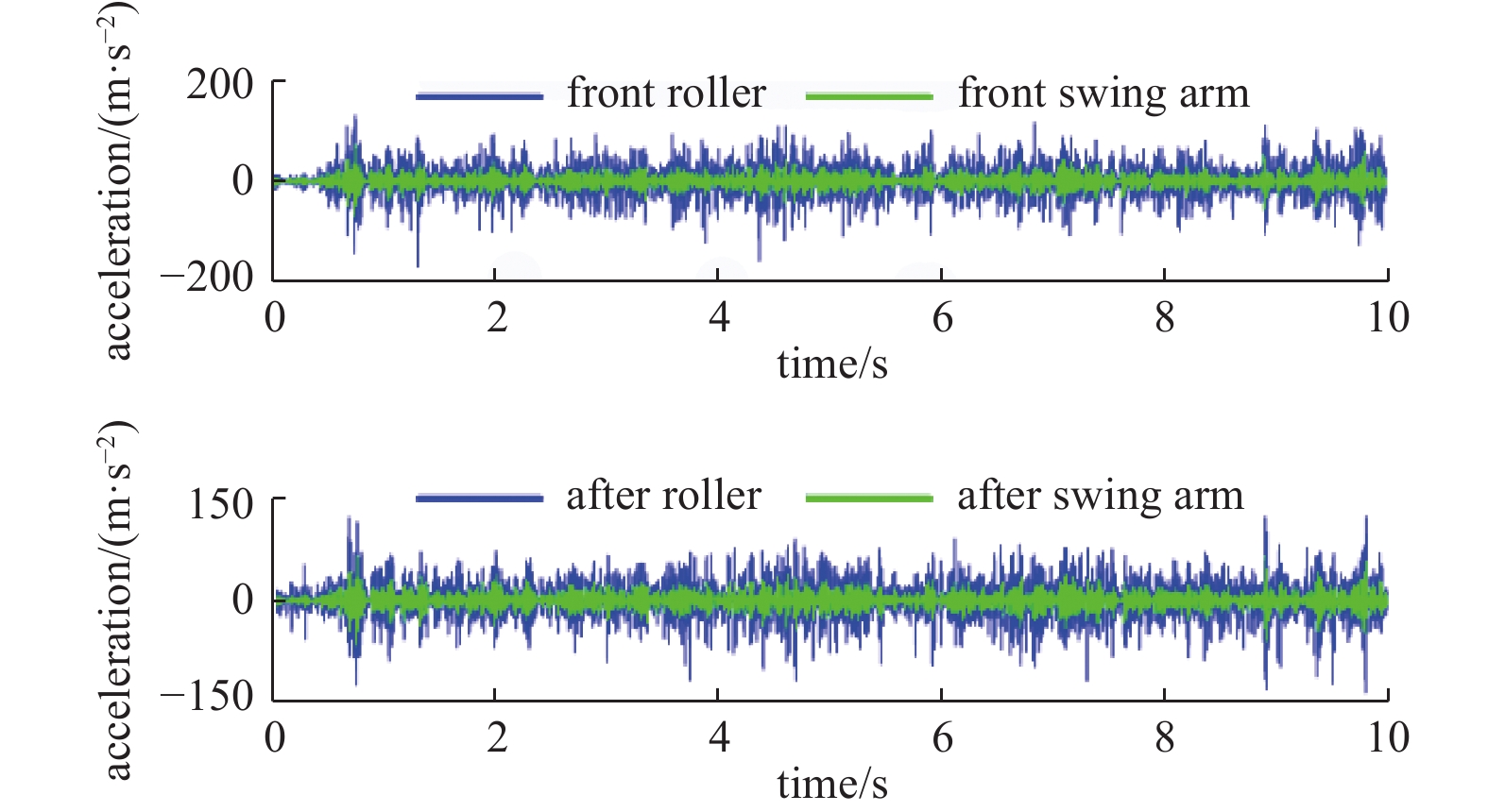
采煤机的无线监测节点存在供电难问题, 采用压电俘能器将振动能转化为电能可为其供电, 研究俘能特性具有重要科学意义. 采用实验与数据拟合方法建立恢复力模型, 磁化电流法建立磁力模型, 拉格朗日函数建立动力学模型, RecurDyn提取滚筒、摇臂的截割方向加速度, 龙格库塔法求解动力学模型, 分析在不同磁距的俘能特性, 并开展实验研究. 结果表明: 受到前滚筒、后滚筒、前摇臂和后摇臂的截割方向加速度, 在俘能特性较好的磁距时, 电压依次减小且均随煤层硬度的增大而增大, 截割f4煤层时, 磁距分别为12 mm, 16 mm, 12 mm和12 mm的俘能特性较好, 电压有效值分别为5.107 V, 4.224 V, 0.998 V和0.882 V, 截割f6煤层时, 磁距均为16 mm的俘能特性较好, 电压有效值分别为7.298 V, 6.747 V, 1.592 V和1.397 V, 加入磁力可以加大电压. 实验研究发现, 受到截割f4和f6煤层的前滚筒截割方向加速度, 在俘能特性较好的磁距时, 电压随煤层硬度的增大而增大, 磁距分别为12 mm和16 mm的俘能特性较好, 电压有效值分别为3.340 V和4.959 V, 加入磁力可以加大电压, 验证了理论分析结果具有正确性. 研究为提高电压提供理论基础, 为无线监测节点自供电提供思路.
2023,
55(10):
2239-2251. doi: 10.6052/0459-1879-23-460
张晓宇, 张旭辉. 矿用压电俘能器建模与俘能特性研究. 力学学报, 2023, 55(10): 2239-2251. doi: 10.6052/0459-1879-23-460.