

A TMP ORIGAMI-SHELL REINFORCED BISTABLE SOFT ROBOT
-
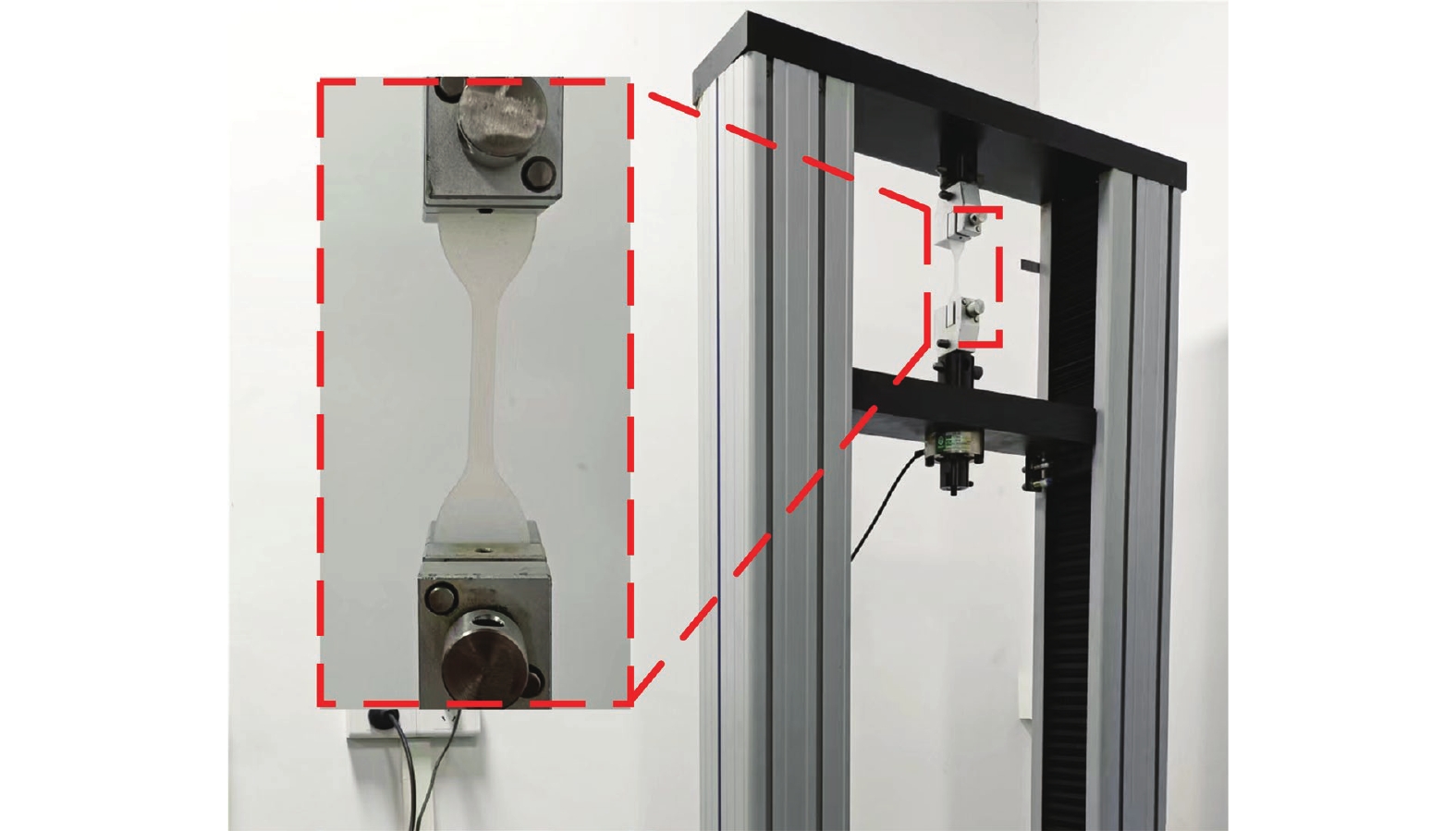
摘要:软体机器人在复杂非结构化环境探索搜救等方面展现出了良好的应用潜力, 但仍存在运动速度较慢、软体结构易受损等问题亟需解决. 基于此, 提出了一种TMP (Tachi-Miura polyhedron)折纸防护的双稳态软体机器人. 软体脊柱、拉簧和TMP折纸外壳组成双稳态系统, 由气压驱动突破双稳态系统的两个能量壁垒, 实现双稳态之间的切换, 并通过快速储存和释放能量驱动软体机器人快速运动. TMP折纸作为软体机器人的外壳, 可为其提供防护, 预防外界坚硬锋利介质刺破软体脊柱; 此外, 其在运动过程中的应变能对软体机器人的双稳态能量势阱具有较大贡献. 结合材料拉伸实验和商用软件中的本构参数拟合法, 确定了软体脊柱材料本构模型参数. 探究了软体脊柱弯曲角度与驱动气压之间的量化关系, 并提出了基于分段常曲率法的软体机器人运动学建模方法. 开展了系列实验测试, 发现所提软体机器人通过图钉模拟的极端环境时仍能正常运动, 在平地上平均速度达到1.81 BLs −1, 其质量−运动速度关系图位于软体机器人和刚性机器人的交叉区域, 属于刚−软耦合机器人. 此外, 证实了所提软体机器人在石子路、泥泞地、浅水沟、浅草地和深水池复杂非结构化环境快速运动能力.Abstract:Soft robots have exhibited promising application potential in complex unstructured environments such as exploration and search and rescue. However, challenges such as slow movement speed and vulnerable soft structures still need to be tackled. To this end, this paper proposes a Tachi-Miura polyhedron (TMP) origami-shell reinforced bistable soft robot to address the abovementioned challenges. The bistable system consists of soft bodies spine, tension spring, and TMP origami shell, driven by air pressure to break through the two energy potential barriers of the bistable system, to switch between bistable states and to drive the soft robot to fast movement by rapidly storing and releasing energy. TMP origami can be regarded as a protective shell for soft robots to prevent hard and sharp media from piercing the soft body; in addition, its strain energy during movement contributes significantly to the bistable energy potential wells of soft robots. The constitutive model parameters of silicone rubber, constructed soft body, are identified by combining the material tensile experiments and the fitting of the constitutive model parameters in commercial software. The quantitative relationship between the soft body and the driving air pressure is explored, and a soft robot kinematic model based on the segmented constant curvature method is presented. A series of experimental tests were carried out, finding that the proposed soft robot could still move normally when passing through the extreme environments simulated by the pushpins. It can reach an average speed of 1.81 BL/s on flat ground, with its mass-motion velocity relationship graph located in the intersection region of the soft and rigid robots. Thus, the proposed TMP origami-shell reinforced bistable soft robot can be classified as a rigid-soft coupled robot. In addition, the proposed soft-bodied robot’s ability to move rapidly in complex unstructured environments on stone roads, muddy ground, gutter ways, grassland, and pools has been confirmed.
-

图 1TMP折纸防护双稳态软体机器人整体结构设计
Figure 1.Design of TMP origami-shell reinforced bistable soft robot

图 5TMP折纸外壳设计: (a)二维单胞; (b)二维折痕图设计; (c)TMP折纸结构; (d)TMP折纸外壳
Figure 5.Design of TMP origami-shell: (a) 2D unit cell; (b) Design of 2D crease pattern; (c) TMP origami structure; (d)TMP origami-shell

图 9TMP折纸防护双稳态软体机器人样机
Figure 9.Prototype of TMP origami-shell reinforced bistable soft robot

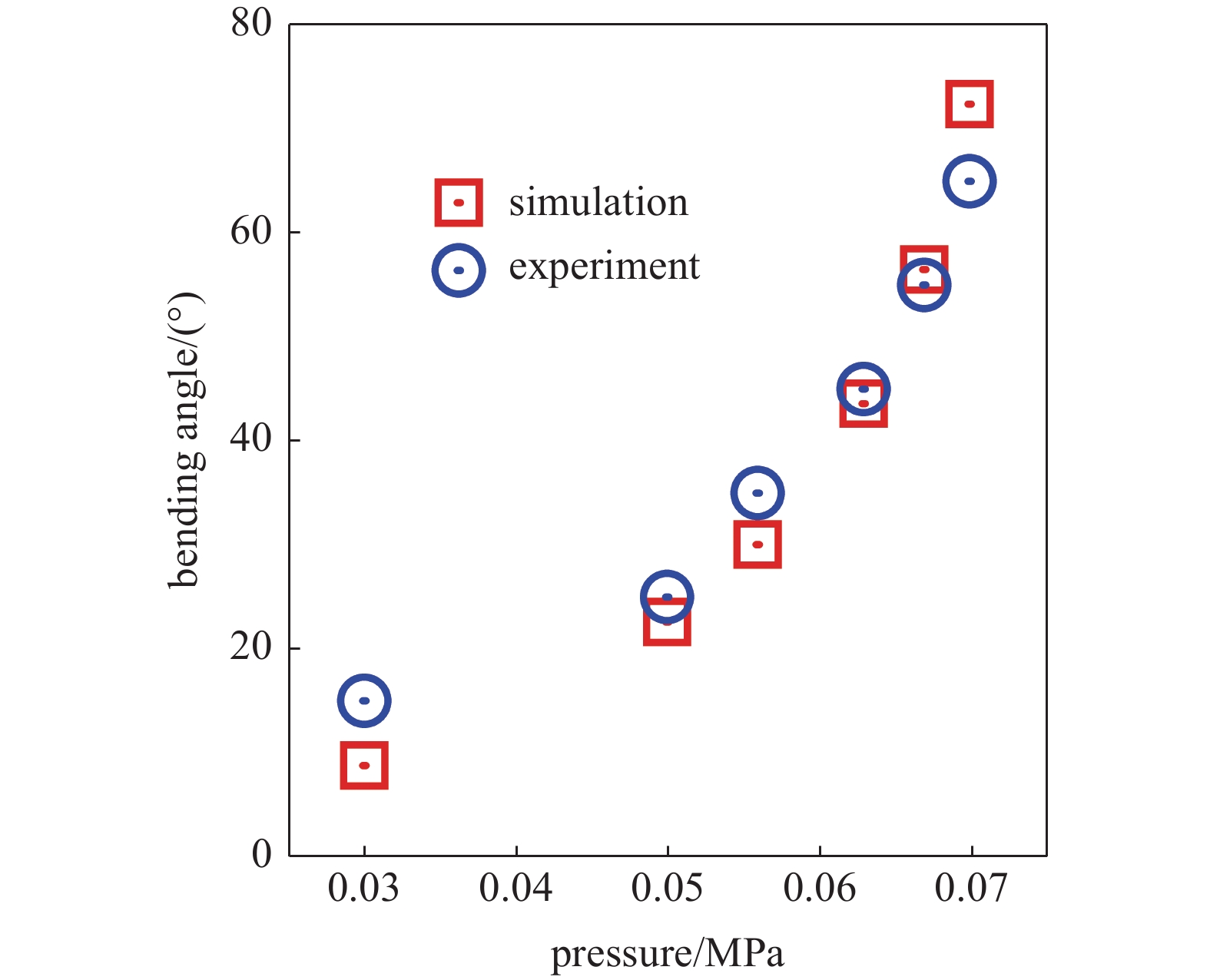
图 13不同气压驱动下软体脊柱变形形态(上: 实验, 下: 仿真) (续)
Figure 13.Deformation form of soft spine in different pressure (top: experiment, bottom: simulation) (continued)

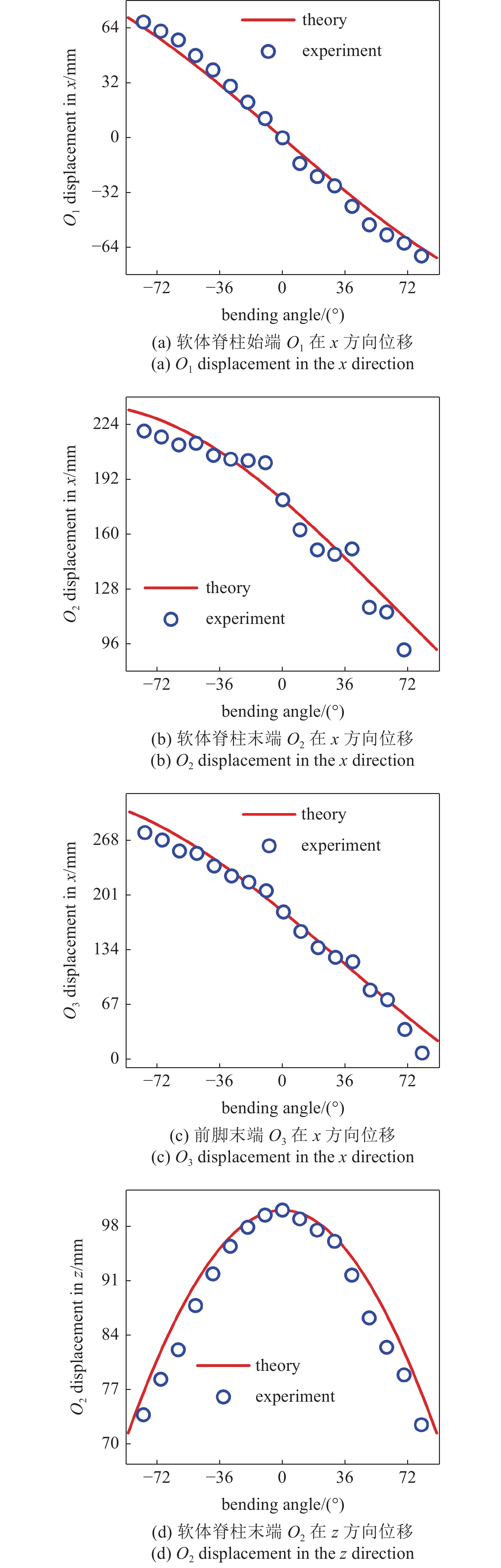
图 18利用运动学模型和实验研究软体机器人运动位移(续)
Figure 18.Kinematic displacement study of soft robot by kinematic model and experiment (continued)

图 21TMP折纸防护软体机器人质量−运动速度图
Figure 21.Mass-speed chart of TMP origami-shell reinforced soft robot
-
[1] 李铁风, 李国瑞, 梁艺鸣等. 软体机器人结构机理与驱动材料研究综述. 力学学报, 2016, 48(4): 756-766 (Li Tiefeng, Li Guorui, Liang Yiming, et al. Review of materials and structures in soft robotics.Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 756-766 (in Chinese)doi:10.6052/0459-1879-16-159Li Tiefeng, Li Guorui, Liang Yiming, et al. Review of materials and structures in soft robotics.Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 756-766(in Chinese))doi:10.6052/0459-1879-16-159 [2] 王田苗, 郝雨飞, 杨兴帮等. 软体机器人: 结构, 驱动, 传感与控制. 机械工程学报, 2017, 53(13): 1-13 (Wang Tianmiao, Hao Yufei, Yang Xingbang, et al. Soft robotics: Structure, actuation, sensing and control.Journal of Mechanical Engineering, 2017, 53(13): 1-13 (in Chinese)doi:10.3901/JME.2017.13.001Wang Tianmiao, Hao Yufei, Yang Xingbang, et al. Soft robotics: structure, actuation, sensing and control.Journal of Mechanical Engineering, 2017, 53(13): 1-13(in Chinese))doi:10.3901/JME.2017.13.001 [3] Rus D, Tolley MT. Design, fabrication and control of soft robots.Nature, 2015, 521(7553): 467-475doi:10.1038/nature14543 [4] Lee C, Kim M, Kim YJ, et al. Soft robot review.International Journal of Control,Automation and Systems, 2017, 15(1): 3-15 [5] Wang H, Totaro M, Beccai L. Toward perceptive soft robots: progress and challenges.Advanced Science, 2018, 5: 1800541doi:10.1002/advs.201800541 [6] 曹玉君, 尚建忠, 梁科山等. 软体机器人研究现状综述. 机械工程学报, 2012, 48(3): 25-33 (Cao Yujun, Shang Jianzhong, Liang Keshan, et al. Review of soft-bodied robots.Journal of Mechanical Engineering, 2012, 48(3): 25-33 (in Chinese)doi:10.3901/JME.2012.03.025Cao Yujun, Shang Jianzhong, Liang Keshan, et al. Review of soft-bodied robots.Journal of Mechanical Engineering, 2012, 48(3): 25-33(in Chinese))doi:10.3901/JME.2012.03.025 [7] 郭健, 潘彬彬, 崔维成等. 基于智能材料的深海执行器及海洋仿生机器人研究综述. 船舶力学, 2022, 26(2): 301-313 (Guo Jian, Pan Binbin, Cui Weicheng, et al. Review of deep-sea actuators and marine bionic robots based on intelligent materials.Journal of Ship Mechanics, 2022, 26(2): 301-313 (in Chinese)Guo Jian, Pan Binbin, Cui Weicheng, et al. Review of deep-sea actuators and marine bionic robots based on intelligent materials.Journal of Ship Mechanics, 2022, 26(2)(in Chinese) [8] Zhao W, Zhang Y, Wang N. Soft robotics: Research, challenges, and prospects.Journal of Robotics and Mechatronics, 2021, 33(1): 45-68doi:10.20965/jrm.2021.p0045 [9] Liu K, Chen W, Yang W, et al. Review of the research progress in soft robots.Applied Sciences, 2023, 13: 120 [10] Su H, Hou X, Zhang X, et al. Pneumatic soft robots: Challenges and benefifits.Actuators, 2022, 11: 92doi:10.3390/act11030092 [11] 赵宇豪, 赵慧, 谭代彬. 软体机器人流体驱动方式综述. 液压与气动, 2022, 45(4): 135-145 (Zhao Yuhao, Zhao Hui, Tan Daibin. Review of fluid driving methods in soft robot.Chinese Hydraulics&Pneumatics, 2022, 45(4): 135-145 (in Chinese)Zhao Yuhao, Zhao Hui, Tan Daibin. Review of fluid driving methods in soft robot.Chinese Hydraulics & Pneumatics, 2022, 45(4): 135-145(in Chinese)) [12] Shepherd RF, IlievskI F, Choi W, et al. Multigait soft robot.Proceedings of the National Academy of Sciences, 2011, 108(51): 20400-20403doi:10.1073/pnas.1116564108 [13] Oh N, Lee JG, Rodrigue H. Torsional pneumatic actuator based on pre-twisted pneumatic tubes for soft robotic manipulators//IEEE/ASME Transactions on Mechatronics, 2023, in press, doi:10.1109/TMECH.2023.3262235 [14] Tang Y, Chi Y, Sun J, et al. Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots.Science Advances, 2020, 6(19): eaaz6912doi:10.1126/sciadv.aaz6912 [15] Daerden F, Lefeber D. Pneumatic artificial muscles: actuators for robotics and automation.European Journal of Mechanical and Enviromental Engineering, 2002, 47(1): 11-22 [16] Zou J, Feng M, Ding N, et al. Muscle-fiber array inspired, multiple-mode, pneumatic artificial muscles through planar design and one-step rolling fabrication.National Science Review, 2021, 8: nwab048doi:10.1093/nsr/nwab048 [17] Arora A, Sarkar D, Kumar A, et al. Low-pressure pneumatic muscles: development, phenomenological modeling, and evaluation in assistive applications through sEMG analysis.Journal of Mechanical Science and Technology, 2022, 36(9): 4719-4733doi:10.1007/s12206-022-0832-0 [18] Marchese AD, Onal CD, Rus D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators.Soft Robotics, 2014, 1(1): 75-87doi:10.1089/soro.2013.0009 [19] Marchese AD, Katzschmann RK, Rus D. A recipe for soft fluidic elastomer robots.Soft Robotics, 2015, 2(1): 7-25doi:10.1089/soro.2014.0022 [20] 方虹斌, 吴海平, 刘作林等. 折纸结构和折纸超材料动力学研究进展. 力学学报, 2022, 54(1): 1-38 (Fang Hongbin, Wu Haiping, Liu Zuolin, et al. Advances in the dynamics of origami structures and origami metamaterials.Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(1): 1-38 (in Chinese)Fang Hongbin, Wu Haiping, Liu Zuolin, et al. Advances in the dynamics of origami structures and origami metamaterials.Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(1): 1-38(in Chinese)) [21] Meloni M, Cai J, Zhang Q, et al. Engineering origami: A comprehensive review of recent applications, design methods, and tools.Advanced Science, 2021, 8(13): 2000636doi:10.1002/advs.202000636 [22] 刘杰, 徐依璐, 陈高锡等. 曲线折痕圆柱折纸力学超材料可定制压缩力学特性. 哈尔滨工程大学学报, 2022, 43(9): 1362-1369 (Liu Jie, Xu Yilu, Chen Gaoxi, et al. Curved-creased origami mechanical metamaterial with tailored compressive mechanical properties.Journal of Harbin Engineering University, 2022, 43(9): 1362-1369 (in Chinese)Liu Jie, Xu Yilu, Chen Gaoxi, et al. Curved-creased origami mechanical metamaterial with tailored compressive mechanical properties.Journal of Harbin Engineering University, 2022, 43(9): 1362-1369(in Chinese)) [23] Chen Y, Peng R, You Z. Origami of thick panels.Science, 2015, 349(6246): 396-400doi:10.1126/science.aab2870 [24] Pzez L, Agarwal G, Paik J. Design and analysis of a soft pneumatic actuator with origami shell reinforcement.Soft Robotics, 2016, 3(3): 109-119doi:10.1089/soro.2016.0023 [25] Seyidoğlu B, Babu SPM, Rafsanjani A. Reconfigurable kirigami skins steer a soft robot//2023 IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2023: 1-6 [26] Liu J, Yang Z, Wen G, et al. Contact mechanics model of wrinkling instability of dielectric elastomer membranes for anti-biofouling.Materials Today Communications, 2023, 34: 105216doi:10.1016/j.mtcomm.2022.105216 [27] Xiao W, Hu D, Chen W, et al. Modeling and analysis of bending pneumaticartificial muscle with multi-degree of freedom.Smart Materials and Structures, 2021, 30: 095018doi:10.1088/1361-665X/ac1939 [28] Runge G, Wiese M, Günther L, et al. A framework for the kinematic modeling of soft material robots combining finite element analysis and piecewise constant curvature kinematics//3rd International Conference on Control, Automation and Robotics (ICCAR). IEEE, 2017: 7-14 [29] Webster RJ, Jones BA. Design and kinematic modeling of constant curvature continuum robots: A review.The International Journal of Robotics Research, 2010, 19(13): 1661-1683 [30] Caasenbrood B, Pogromsky A, Nijmeijer H. Control-oriented models for hyperelastic soft robots through differential geometry of curves.Soft Robotics, 2022, in press, doi:10.1089/soro.2021.0035 [31] Wu Y, Yim JK, Liang J, et al. Insect-scale fast moving and ultrarobust soft robot.Science Robotics, 2019, 4(32): eaax1594doi:10.1126/scirobotics.aax1594 [32] 文桂林, 刘杰, 陈梓杰等. 非线性连续体拓扑优化方法综述. 力学学报, 2022, 54(10): 2659-2675 (Wen Guilin, Liu Jie, Chen Zijie, et al. A survey of nonlinear continuum topology optimization methods.Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(10): 2659-2675 (in Chinese)doi:10.6052/0459-1879-22-179Wen Guilin, Liu Jie, Chen Zijie, et al. A survey of nonlinear continuum topology optimization methods.Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(10): 2659-2675(in Chinese))doi:10.6052/0459-1879-22-179 -

 下载:
下载:



















 点击查看大图
点击查看大图

图(22)
计量
- 文章访问数:528
- HTML全文浏览量:161
- PDF下载量:105
- 被引次数:0



