

DYNAMIC MODELING AND ANALYSIS FOR NON-RIGID ORIGAMI STRUCTURE CONSIDERING NONLINEAR CONSTITUTIVE RELATION
-
摘要:折纸结构因其大收纳比、高可控性、可重构、制造装配简单以及设计多样等优势, 在航天、生物医学、建筑、机器人、材料科学等工程领域有着广阔的应用前景. 随着折纸结构的工程应用越来越广泛, 针对低刚度折纸结构的动力学研究愈加重要. 本文将非刚性折纸结构等效为带卷簧的空间桁架结构, 建立了一种通用的杆–链动力学模型. 考虑材料的几何非线性, 采用基于Ogden超弹性本构的杆单元来模拟折痕和虚拟折痕, 可适用于作大范围运动并具有大变形的折纸结构. 引入非线性卷簧来体现折痕的抗弯作用, 相较于传统的卷簧本构模型, 本文提出的改进的非线性卷簧本构模型具有更强的通用性和鲁棒性, 能够有效避免接触碰撞动力学中折叠面的穿透. 基于虚功原理, 建立了考虑阻尼效应的非刚性折纸多体系统的动力学方程, 并采用变步长的广义- α法求解. 最后, 对三种经典折叠形式的非刚性折纸结构进行动力学仿真, 验证了本文提出的杆–链动力学模型的准确性和高效性. 通过施加虚拟折痕和修正初始构型, 有效解决了刚性折纸模型中展开和收拢过程的锁定问题. 与刚性折纸模型相比, 杆–链动力学模型具有更好的数值模拟通用性, 并能够给出具有大变形张紧构型. 在此基础上, 揭示了非刚性折纸结构复杂的动力学行为, 并对多稳态、瞬态动力学和波动力学特性进行分析.Abstract:Due to the advantages of large storage ratio, high controllability, reconfigurability, easy assembly and diversified design, the origami structure has broad application prospects in the fields of aerospace, biomedicine, architecture, robotics, material science, etc. With the development of origami structure engineering, the dynamic research for the origami structure with low stiffness becomes more important. In this paper, a general bar-and-hinge dynamics model is developed, in which a non-rigid origami structure is equivalent to a spatial truss structure with rotational spring. Considering the geometric nonlinearity of the material, a bar element based on Ogden hyperelastic constitutive model is used to simulate the creases and virtual creases of the non-rigid origami structure, which can deal with the non-rigid origami structure with large overall motions and large deformations. A nonlinear rotational spring is introduced to reflect the bending resistance of the crease. Compared with the traditional rotational spring constitutive model, the modified nonlinear rotational spring constitutive model proposed in this paper has stronger versatility and robustness, and can effectively avoid the mutual penetration between the folding surfaces in contact-impact dynamics. Based on the principle of virtual work, the dynamic equations of the non-rigid origami multibody system considering the damping effect are established, which are solved by the variable-step generalized- αmethod. Finally, a series of numerical examples of three classical origami structures are presented to verify the accuracy and efficiency of the bar-and-hinge dynamics model proposed in this paper. Furthermore, by adding virtual creases and correcting the initial configuration, the locking problem of the unfolding and folding process in the rigid origami model is effectively resolved. Compared with the rigid origami model, the bar-and-hinge dynamics model can continue to perform further calculation and provide the fully deployed configuration with large deformation. On this basis, the complex dynamic behaviors of the non-rigid origami structure are revealed, and the mechanics characteristics of multi-stable, transient dynamics and wave dynamics are analyzed.
-

图 3非线性卷簧单元的本构模型: 力矩与二面角的关系
Figure 3.Nonlinear constitutive model of rotational spring: Dihedral angleθversus momentM

图 8I, II, III方式下叶内折叠展开过程的奇异构型
Figure 8.Singular configuration of leaf-in origami during the deployment in I, II, III cases

图 9叶内折叠展开和收拢过程中A点z坐标时域图
Figure 9.Time history ofzcoordinate of pointAof leaf-in origami during unfolding and folding process

图 10叶内折叠: (a)初始构型; (b) 1/8模型卷簧分布
Figure 10.Leaf-in origami: (a) Initial configuration and (b) spring patter in 1/8 model

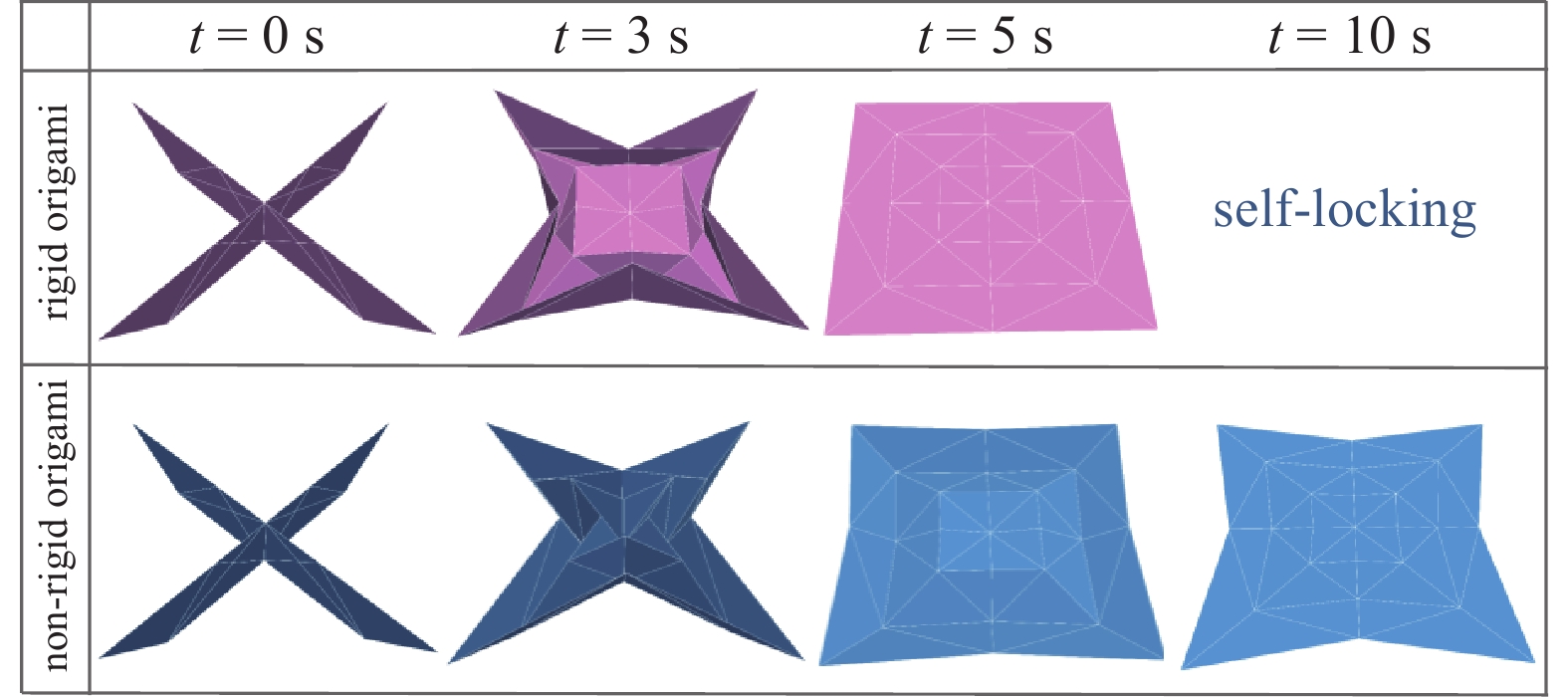
图 11叶内折叠: 刚性与非刚性折纸模型展开过程构型图
Figure 11.Leaf-in origami: Configuration of the rigid and non-rigid origami models during the deployment

图 12叶内折叠:A点z坐标的 (a)位置; (b)速度; (c)加速度时域图
Figure 12.Leaf-in origami: Time histories ofzcoordinate of pointAof (a) position, (b) velocity and (c) acceleration

图 13叶内折叠: 点A,E,F,G(图10)z坐标时域图
Figure 13.Leaf-in origami: Time history ofzcoordinate of pointsA,E,F,G(see Fig. 10)

图 14Kresling折叠: (a)折痕分布; 柱状结构: (b)主视图, (c)俯视图
Figure 14.Kresling origami: (a) crease pattern. Columnar structure: (b) front view and (c) top view

图 15Kresling折叠: 不同多边形下, (a)势能曲线, (b)力–位移曲线
Figure 15.Kresling origami: (a) Potential energy curve and (b) force-displacement curve in different shapes

图 16Kresling折叠: 不同多边形中特殊点处(见图15(b))构型图
Figure 16.Kresling origami: Configuration of special points (see Fig. 15(b)) in different shapes

图 18正十边形Kresling折叠: (a)z坐标时域图; (b) 不同卷簧本构模型中特殊点处(见图18(a))的构型图
Figure 18.Regular decagon Kresling origami: Time histories of (a)zcoordinate; (b) configuration of special points (see Fig. 18(a)) in different rotational spring constitutive models

图 19正十边形Kresling折叠: 应变能云图
Figure 19.Regular decagon Kresling origami: Strain energy cloud map

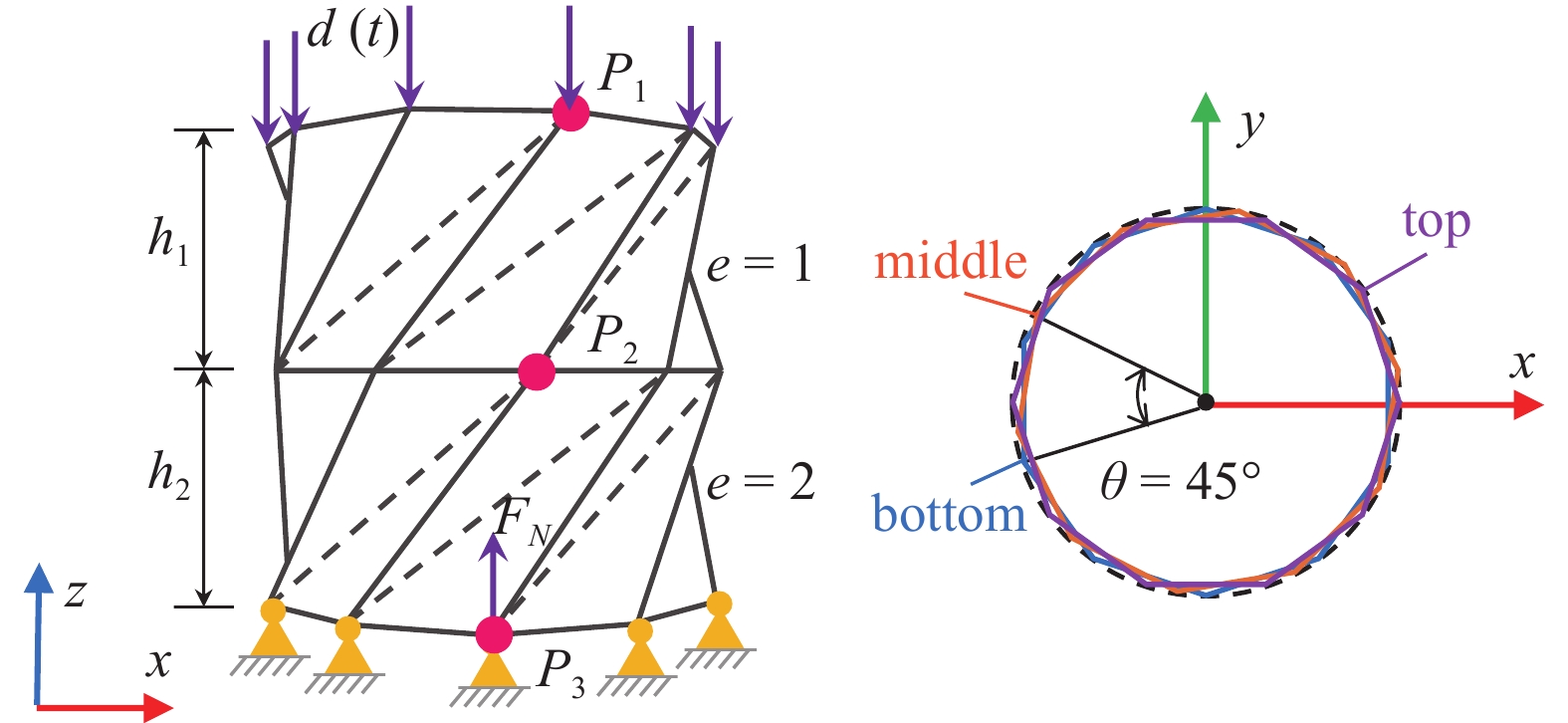
图 20正十边形Kresling法向支座反力FN时域图
Figure 20.Time history of the normal support reaction forceFNof the regular decagon Kresling origami

图 21多链Kresling折纸结构波动力学
Figure 21.Wave dynamics of multi-chain Kresling origami structure

图 22多链Kresling折纸结构的应变–构型图
Figure 22.Strain-configuration of multi-chain Kresling origami structure

图 23多链Kresling折纸结构应变波传播的时空图
Figure 23.Space-time of strain wave propagation in multi-chain Kresling origami structure

图 24多链Kresling折纸结构: 不同单元的应变时间历程图
Figure 24.Multi-chain Kresling origami structure: Strain versus time curves in different unites
-
[1] You Z. Folding structures out of flat materials.Science, 2014, 345(6197): 623-624doi:10.1126/science.1257841 [2] 李笑, 李明. 折纸及其折痕设计研究综述. 力学学报, 2018, 50(3): 467-476doi:10.6052/0459-1879-18-031Li Xiao, Li Ming. A review of origami and its crease design.Chinese Journal of Theoretical and Applied Mechanics, 2018, 50(3): 467-476 (in Chinese)doi:10.6052/0459-1879-18-031 [3] Meloni M, Cai J, Zhang Q, et al. Engineering origami: A comprehensive review of recent applications, design methods, and tools.Advanced Science, 2021, 8: 2000636doi:10.1002/advs.202000636 [4] Morgan J, Magleby SP, Howell LL. An approach to designing origami-adapted aerospace mechanisms.Journal of Mechanical Design, 2016, 138(5): 052301doi:10.1115/1.4032973 [5] Bruton JT, Nelson TG, Zimmerman TK, et al. Packing and deploying soft origami to and from cylindrical volumes with application to automotive airbags.Royal Society Open Science, 2016, 3(9): 160429doi:10.1098/rsos.160429 [6] Yuan T, Liu Z, Zhou Y, et al. Dynamic modeling for foldable origami space membrane structure with contact-impact during deployment.Multibody System Dynamics, 2020, 50(1): 1-24doi:10.1007/s11044-020-09737-x [7] Miyashita S, Guitron S, Yoshida K, et al. Ingestible, controllable, and degradable origami robot for patching stomach wounds//IEEE International Conference on Robotics and Automation, 2016: 909-916 [8] Shang Z, Ma J, You Z, et al. A braided skeleton surgical manipulator with tunable diameter//8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics, 2020: 223-228 [9] Bobbert FSL, Janbaz S, Van Manen T, et al. Russian doll deployable meta-implants: fusion of kirigami, origami, and multi-stability.Materials&Design, 2020, 191: 108624 [10] Masera G, Pesenti M, Fiorito F. Exploration of adaptive origami shading concepts through integrated dynamic simulations.Journal of Architectural Engineering, 2018, 24: 04018022doi:10.1061/(ASCE)AE.1943-5568.0000323 [11] Ando K, Izumi B, Shigematsu M, et al. Lightweight rigidly foldable canopy using composite materials.SN Applied Sciences, 2020, 2(12): 1994doi:10.1007/s42452-020-03846-0 [12] Attia S. Evaluation of adaptive facades: the case study of Al Bahr Towers in the UAE//Q Science Connect (Shaping Qatar’s Sustainable Built Environment-2), 2017: 6 [13] Paez L, Agarwal G, Paik J. Design and analysis of a soft pneumatic actuator with origami shell reinforcement.Soft Robotics, 2016, 3(3): 109-119doi:10.1089/soro.2016.0023 [14] Zhang Z, Fan W, Chen G, et al. A 3D printable origami vacuum pneumatic artificial muscle with fast and powerful motion//2021 IEEE 4th International Conference on Soft Robotics, 2021: 551-554 [15] Zhang Z, Tang S, Fan W, et al. Design and analysis of hybrid-driven origami continuum robots with extensible and stiffness-tunable sections.Mechanism and Machine Theory, 2022, 169: 104607doi:10.1016/j.mechmachtheory.2021.104607 [16] Zhang Q, Fang H, Xu J. Yoshimura-origami based earthworm-like robot with 3-dimensional locomotion capability.Frontiers in Robotics and AI, 2021, 8: 738214doi:10.3389/frobt.2021.738214 [17] Liu W, Jiang H, Chen Y. 3D programmable metamaterials based on reconfigurable mechanism modules.Advanced Functional Materials, 2022, 32: 2109865doi:10.1002/adfm.202109865 [18] Zhai Z, Wang Y, Jiang H. Origami-inspired, on-demand deployable and collapsible mechanical metamaterials with tunable stiffness.Proceedings of the National Academy of Sciences, 2018, 115(9): 2032-2037doi:10.1073/pnas.1720171115 [19] Ma J, Dai H, Chai S, et al. Energy absorption of sandwich structures with a kirigami-inspired pyramid foldcore under quasi-static compression and shear.Materials&Design, 2021, 206: 109808 [20] 李明, 蒋延达, 崔琦峰等. 折纸衍生空间可展结构研究回顾与展望刍议. 机械工程学报, 2021, 57(23): 53-65doi:10.3901/JME.2021.23.053Li Ming, Jiang Yanda, Cui Qifeng, et al. Immature state-of-the-art review on origami-inspired spaceborne deployable structures.Journal of Mechanical Engineering, 2021, 57(23): 53-65(in Chinese)doi:10.3901/JME.2021.23.053 [21] Chen Y, Peng R, You Z. Origami of thick panels.Science, 2015, 349(6246): 396-400doi:10.1126/science.aab2870 [22] Tachi T. Geometric considerations for the design of rigid origami structures//Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium, 2010: 12 [23] Ma J, Feng H, Chen Y, et al. Folding of tubular waterbomb.Research, 2020, 8: 1735081 [24] 方虹斌, 吴海平, 刘作林等. 折纸结构和折纸超材料动力学研究进展. 力学学报, 2022, 54(1): 1-38doi:10.6052/0459-1879-21-478Fang Hongbin, Wu Haiping, Liu Zuolin, et al. Advances in the dynamics of origami structures and origami metamaterials.Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(1): 1-38 (in Chinese)doi:10.6052/0459-1879-21-478 [25] 冯慧娟, 杨名远, 姚国强等. 折纸机器人. 中国科学: 技术科学, 2018, 48(12): 1259-1274doi:10.1360/N092018-00213Feng Huijuan, Yang Mingyuan, Yao guoqiang, et al. Origami robots.Scientia Sinica Technologica, 2018, 48(12): 1259-1274 (in Chinese)doi:10.1360/N092018-00213 [26] Tachi T. Simulation of rigid origami//Fourth International Meeting of Origami Science, Mathematics, and Education, 2009 [27] Na JH, Evans AA, Bae J, et al. Programming reversibly self-folding origami with micropatterned photo-crosslinkable polymer trilayers.Advanced Materials, 2015, 27(1): 79-85doi:10.1002/adma.201403510 [28] Gattas JM, You Z. The behaviour of curved-crease foldcores under low-velocity impact loads.International Journal of Solids and Structures, 2015, 53: 80-91doi:10.1016/j.ijsolstr.2014.10.019 [29] Cai J, Ren Z, Ding Y, et al. Deployment simulation of foldable origami membrane structures.Aerospace Science and Technology, 2017, 67: 343-353doi:10.1016/j.ast.2017.04.002 [30] Filipov ET, Paulino GH, Tachi T. Origami tubes with reconfigurable polygonal cross-sections.Proceedings of the Royal Society A:Mathematical,Physical and Engineering Sciences, 2016, 472(2185): 20150607doi:10.1098/rspa.2015.0607 [31] Yuan T, Tang L, Liu Z, et al. Nonlinear dynamic formulation for flexible origami-based deployable structures considering self-contact and friction.Nonlinear Dynamics, 2021, 106(3): 1789-1822doi:10.1007/s11071-021-06860-y [32] 徐彦, 关富玲. 可展开薄膜结构折叠方式和展开过程研究. 工程力学, 2008, 25(5): 176-181Xu Yan, Guan Fuling. Fold methods and deployment analysis of deployable membrane structure, Engineering Mechanics, 2018, 25(5): 176-181(in Chinese) [33] 邱海, 方虹斌, 徐鉴. 多稳态串联折纸结构的非线性动力学特性. 力学学报, 2019, 51(4): 1110-1121doi:10.6052/0459-1879-19-115Qiu Hai, Fang Hongbin, Xu Jian. Nonlinear dynamical characteristics of a multi-stable series origami structure.Chinese Journal of Theoretical and Applied Mechanics, 2019, 51(4): 1110-1121 (in Chinese)doi:10.6052/0459-1879-19-115 [34] Fang H, Chu SCA, Xia Y, et al. Programmable self-locking origami mechanical metamaterials.Advanced Materials, 2018, 30(15): 1706311doi:10.1002/adma.201706311 [35] Zhang Q, Fang H, Xu J. Programmable stopbands and supratransmission effects in a stacked Miura-origami metastructure.Physical Review E, 2020, 101(4): 042206doi:10.1103/PhysRevE.101.042206 [36] Fang H, Chang TS, Wang KW. Magneto-origami structures: engineering multi-stability and dynamics via magnetic-elastic coupling.Smart Materials and Structures, 2019, 29(1): 015026 [37] Yasuda H, Tachi T, Lee M, et al. Origami-based tunable truss structures for non-volatile mechanical memory operation.Nature Communications, 2017, 8(1): 962doi:10.1038/s41467-017-00670-w [38] Schenk M, Guest S. Origami folding: a structural engineering approach//Fifth International Meeting of Origami Science, Mathematics, and Education, 2010: 16 [39] Wei ZY, Guo ZV, Dudte L, et al. Geometric mechanics of periodic pleated origami.Physical Review Letters, 2013, 110(21): 215501doi:10.1103/PhysRevLett.110.215501 [40] Fuchi K, Diaz AR. Origami design by topology optimization.Journal of Mechanical Design, 2013, 135(11): 111003doi:10.1115/1.4025384 [41] Fuchi K, Buskohl PR, Bazzan G, et al. Origami actuator design and networking through crease topology optimization.Journal of Mechanical Design, 2015, 137(9): 091401doi:10.1115/1.4030876 [42] Liu K, Paulino GH. Nonlinear mechanics of non-rigid origami: an efficient computational approach.Proceedings of the Royal Society A, 2017, 473(2206): 20170348doi:10.1098/rspa.2017.0348 [43] Filipov ET, Liu K, Tachi T, et al. Bar and hinge models for scalable analysis of origami.International Journal of Solids and Structures, 2017, 124: 26-45doi:10.1016/j.ijsolstr.2017.05.028 [44] Dong S, Zhao X, Yu Y. Dynamic unfolding process of origami tessellations.International Journal of Solids and Structures, 2021, 111075: 226-227 [45] Wriggers P. Nonlinear Finite Element Methods (vol. 4). Berlin, Germany: Springer, 2008 [46] Ogden RW. Non-linear Elastic Deformations, New York: Dover Publications, 1997 [47] Arnold M, Brüls O. Convergence of the generalized-α scheme for constrained mechanical systems.Multibody System Dynamics, 2007, 18(2): 185-202doi:10.1007/s11044-007-9084-0 [48] Noels L, Stainier L, Ponthot JP. Self-adapting time integration management in crash-worthiness and sheet metal forming computations.International Journal of Vehicle Design, 2002, 30(1-2): 67-114 [49] 史加贝. 基于共旋坐标法的大变形薄板多体系统非连续动力学建模与仿真研究. [博士论文]. 上海: 上海交通大学, 2018Shi Jiabei. Research on discontinuous dynamics modeling and simulation for multibody system of large deformational thin shell based on corotational formulation. [PhD Thesis]. Shanghai: Shanghai Jiao Tong University, 2018 (in Chinese) [50] De Focatiis DSA, Guest SD. Deployable membranes designed from folding tree leaves.Philosophical Transactions of the Royal Society of London. Series A:Mathematical,Physical and Engineering Sciences, 2002, 360(1791): 227-238doi:10.1098/rsta.2001.0928 [51] Leon SE, Lages EN, De Araújo CN, et al. On the effect of constraint parameters on the generalized displacement control method.Mechanics Research Communications, 2014, 56: 12 -

 下载:
下载:























 点击查看大图
点击查看大图

计量
- 文章访问数:845
- HTML全文浏览量:366
- PDF下载量:241
- 被引次数:0



